Le Celestron Edge HD 8 est un très bel instrument pour l’astronomie planétaire.
Son ouverture à f/d 10 et son champ réduit se prêtent parfaitement à l’observation de la Lune, Jupiter, Saturne ou Vénus lorsqu’elles sont suffisamment hautes sur l’horizon.
Le souci de cet instrument réside dans son système de mise au point par déplacement du miroir qui manque cruellement de précision, problème que j’ai corrigé avec l’installation d’un porte oculaire Crayford et l’ajout d’un renvoi coudé quartz.
J’ai enfin pu tester le setup sur Jupiter et la nébuleuse d’Orion depuis la terrasse du jardin un soir après le travail.
J’ai installé un Barlow x 3 ainsi qu’un oculaire grand champ Explore Scientific de 14 mm, l’équivalent d’un oculaire de 5 mm soit un grossissement de plus de 400 fois avec un très belle image.
J’ai également testé ma caméra de guidage noir et blanc pour filmer la planète avec le Barlow x 3. C’était la première fois que je tentais une acquisition d’image via ce procédé et cela fonctionne plutôt bien à condition d’avoir compris que la vidéo n’est pas enregistrée sur la mémoire de l’Asiair mais dans la tablette.
Pour traiter ces vidéos, il existe de nombreux logiciels sous Windows. Mais voilà, je suis sur Mac. Du coup tout devient plus compliqué. Il y a bien un logiciel qui fait le travail. Il s’appelle Planetary System Stacker. Hélas il fonctionne avec le langage Python.
Et pour tout vous dire cela fait des années que je n’ai pas bidouillé en informatique encore moins sur MacOs.
Je ai récupéré le code source du logiciel, puis j’ai installer plusieurs versions de Python 3 sur l’iMac avant de trouver la bonne. Ensuite il a fallu comprendre la documentation d’installation et de configuration de Planetary System Stacker sur un Mac. Le mode d’emploi fourni était des plus lacunaire alors j’ai navigué dans les forums d’astrofondus.
Le logiciel nécessitait l’ajout de plusieurs bibliothèques Python non fournies, des mises à jour de la distribution et quelques ajustements pour que cela fonctionne. Cela m’a pris plusieurs heures pour trouverez et tout à coup, miracle, Planetary System Stacker à démarré.
Il fonctionne avec des fichiers .SER alors que j’avais enregistré mes images en .MP4 avec l’Asiair. Le logiciel SIRIL m’a permis de convertir ma vidéo au bon format et le cœur battant j’ai testé Planetary System Stacker.
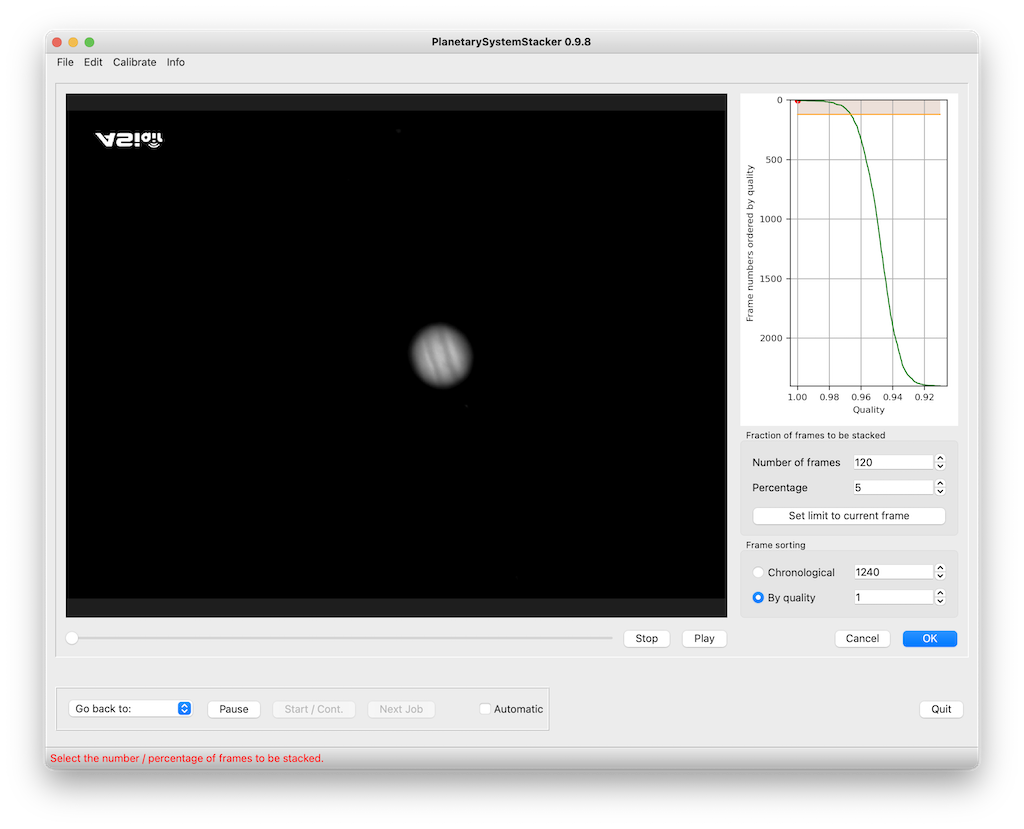
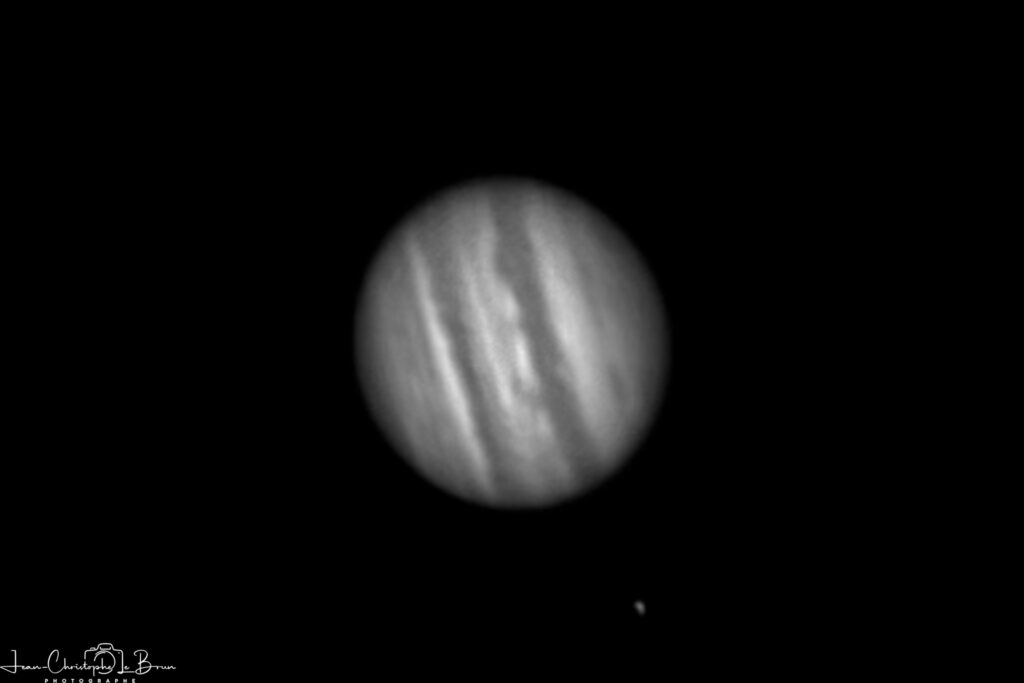
Le logiciel sélectionné dans la vidéo les meilleures images (les plus nettes) et ensuite les additionne comme pour le stacking du ciel profond. Après, quelques curseurs vous permettent d’améliorer l’image obtenue.
Le résultat est assez moche mais cela reste ma plus belle image de Jupiter à ce jour donc je suis très content.
Vu que cela fonctionne, je pense maintenant m’équiper d’une caméra couleur dédiée au planétaire. La caméra ASI533MC que j’utilise pour le ciel profond n’est pas forcément adaptée à cet exercice.
Pour ceux que cela intérresse voici un mode opératoire pour l’installation de Planetary System Stacker sous Mac, du moins les étapes dont je me souviens.
Le code source du logiciel Planetary System Stacker est ici : https://github.com/Rolf-Hempel/https://github.com/Rolf-Hempel/PlanetarySystemStacker
C’est la version 0.9.8.3. Vous récupérez une archive PlanetarySystemStacker-master.zip qu’il suffit de décompresser et qui contient le code du software.
Pour installer Python sur votre Mac, allez sur cette page : https://www.python.org/downloads/macos/
J’ai choisi la version Python 3.9.13 MacOS Intel car mon vieux Mac tourne avec un micro processeur Intel i7 et que celle-ci semblait fonctionner avec le code.
Vous récupérez un fichier python-3.9.13-macosx10.9.pkg sur lequel il faut cliquer pour l’installer. Une fois installé, lancez le Python Launcher, l’icône de la petite fusée jaune et bleue.
Dans le répertoire décompressé PlanetarySystemTracker-master vous trouverez le fichier texte PyPI_Instructions.txt qui explique comment installer le logiciel, vous pouvez essayer, mais je ne suis pas certain que vous arriverez au bout sans un message d’erreur.
J’ai ouvert un Terminal (une invite de commande Linux si vous préférez), ça se trouve dans les Applications (Launchpad), dans Autre, Terminal.

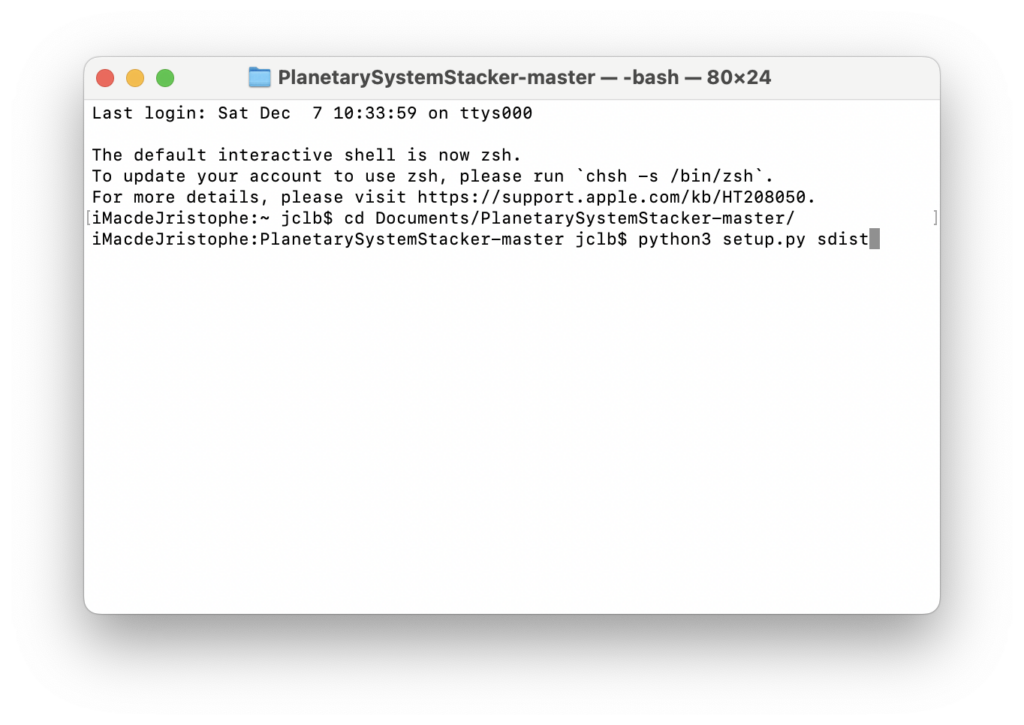
Depuis le terminal je me suis placé dans le répertoire où j’ai désarchivé mon fichier ZIP puis le répertoire de l’archive (le texte en italique est a taper dans le terminal) :
cd Documents/PlanetarySystemStacker-master
J’ai lancé la commande (pas certain qu’elle soit utile mais je l’ai fait) : python3 setup.py sdist
Il va vous falloir deux bibliothèques Python pour que cela fonctionne : twine et bdist_wheel
Pour installer bdlist_wheel tapez : pip3 install wheel
Pour installer twine par contre je suis passé par ce lien où vous téléchargez une archive twine-6.0.1.tar.gz : https:/github.com/pypa/twine/
Pour l’installer tapez ou un truc du genre : pip3 install twine ou python3 install twine, je en sais plus.
Tapez ensuite : python3 setup_macos.py bdist_wheel –plat-name macosx_10_6_intel pour installer wheel
Mettez à jour Planetary System Stacker avec cette commande : pip3 install –upgrade planetary-system-stacker
Normalement votre logiciel est installé. Placez-vous dans le répertoire PlanetarySystemStacker-master/planetary_system_stacker : cd planetary_system_stacker
Et lancez le programme : python3 planetary_system_stacker.py
Le logiciel devrait s’ouvrir. Pour son utilisation, je vous renvoie à sa documentation en PDF PlanetarySystemStacker_User-Guide.pdf
Bonne chance !